- 您的位置:首页>简历与面试>看完这篇,吊打你的操作系统面试官(上)
看完这篇,吊打你的操作系统面试官(上)
时间: 2020-12-30 09:54 作者: 朱志勇 点击次数:
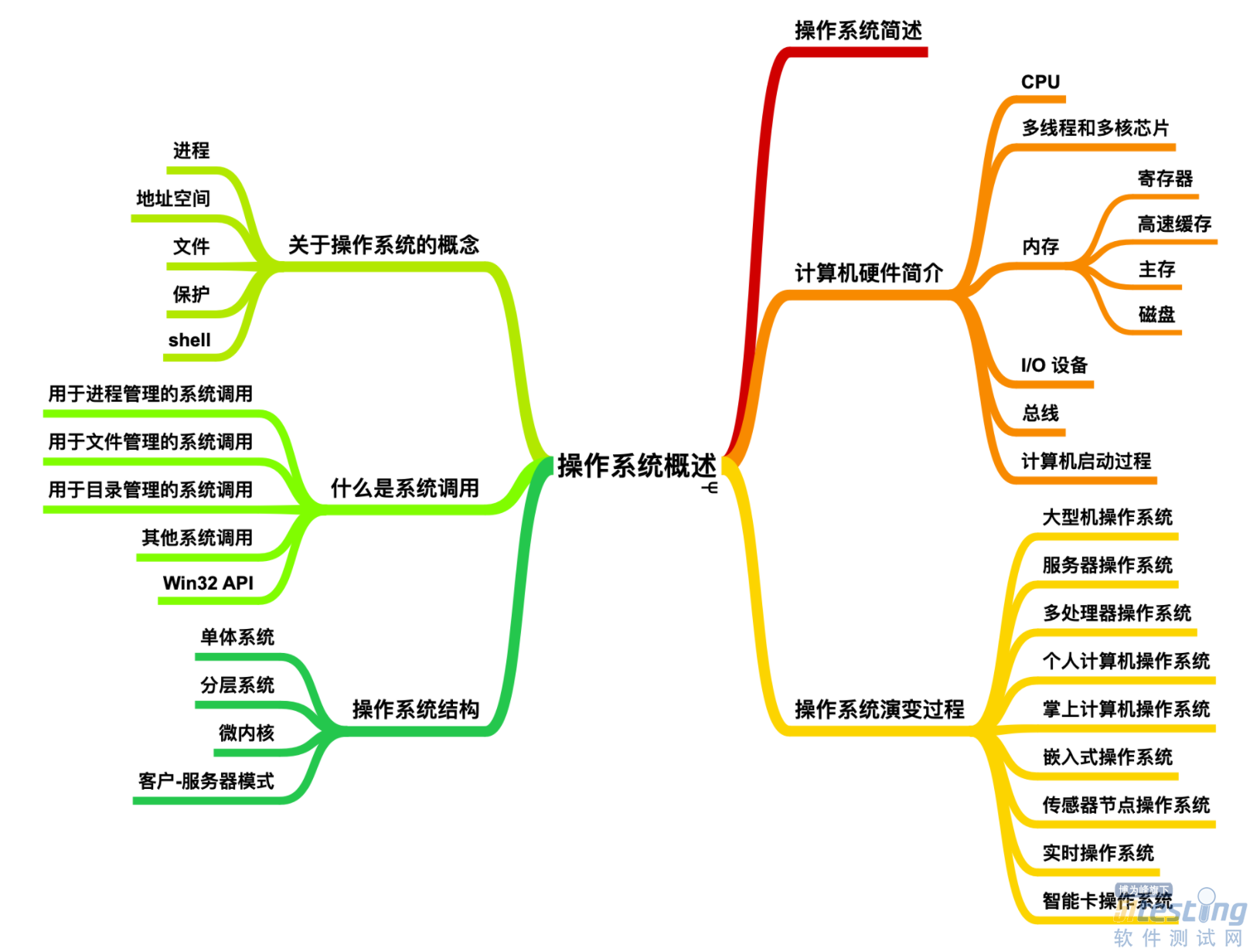
文章主要结构图如下:
现代计算机系统由一个或多个处理器、主存、打印机、键盘、鼠标、显示器、网络接口以及各种输入/输出设备构成。
然而,程序员不会直接和这些硬件打交道,而且每位程序员不可能会掌握所有计算机系统的细节,这样我们就不用再编写代码了,所以在硬件的基础之上,计算机安装了一层软件,这层软件能够通过响应用户输入的指令达到控制硬件的效果,从而满足用户需求,这种软件称之为 操作系统,它的任务就是为用户程序提供一个更好、更简单、更清晰的计算机模型。
我们一般常见的操作系统主要有 Windows、Linux、FreeBSD 或 OS X ,这种带有图形界面的操作系统被称为 图形用户界面(Graphical User Interface, GUI),而基于文本、命令行的通常称为 Shell。下面是我们所要探讨的操作系统的部件:

这是一个操作系统的简化图,最下面的是硬件,硬件包括芯片、电路板、磁盘、键盘、显示器等我们上面提到的设备,在硬件之上是软件。大部分计算机有两种运行模式:内核态 和 用户态,软件中最基础的部分是操作系统,它运行在 内核态 中,内核态也称为 管态 和 核心态,它们都是操作系统的运行状态,只不过是不同的叫法而已。操作系统具有硬件的访问权,可以执行机器能够运行的任何指令。软件的其余部分运行在用户态下。
用户接口程序(shell 或者 GUI)处于用户态中,并且它们位于用户态的最低层,允许用户运行其他程序,例如 Web 浏览器、电子邮件阅读器、音乐播放器等。而且,越靠近用户态的应用程序越容易编写,如果你不喜欢某个电子邮件阅读器你可以重新写一个或者换一个,但你不能自行写一个操作系统或者是中断处理程序。这个程序由硬件保护,防止外部对其进行修改。
计算机硬件简介
操作系统与运行操作系统的内核硬件关系密切。操作系统扩展了计算机指令集并管理计算机的资源。因此,操作系统因此必须足够了解硬件的运行,这里我们先简要介绍一下现代计算机中的计算机硬件。
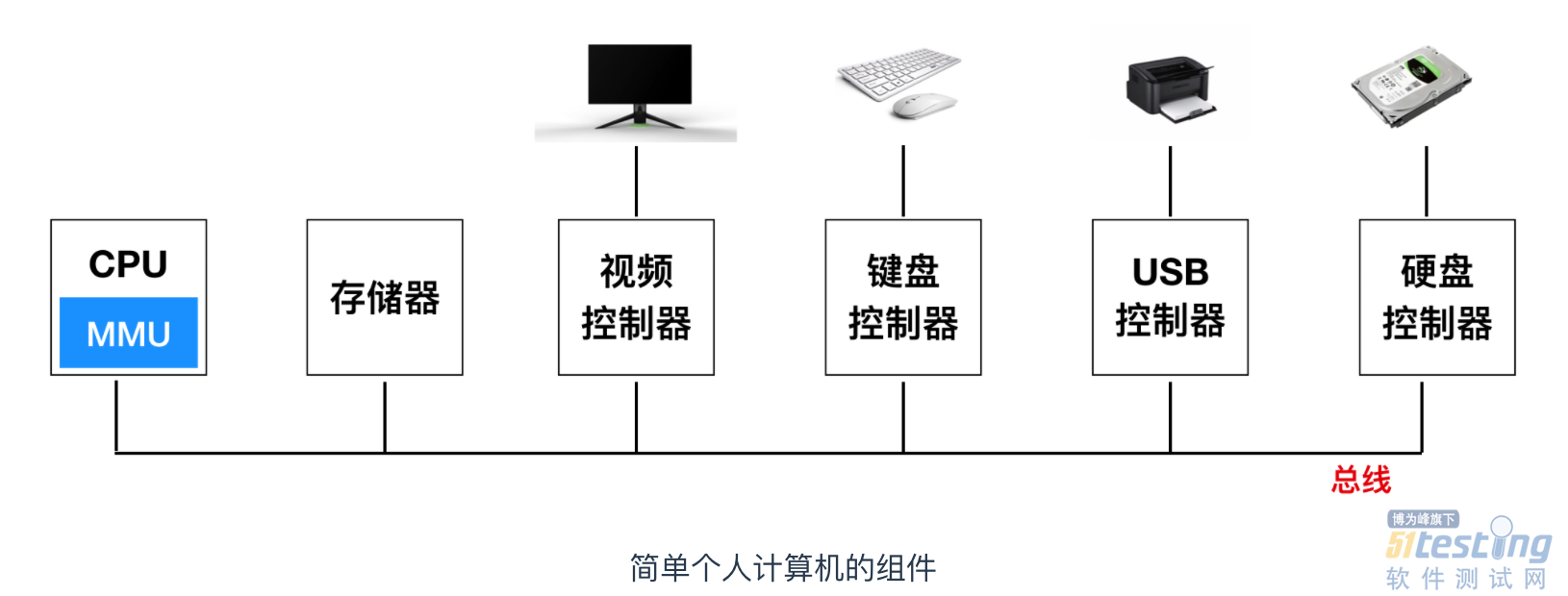
从概念上来看,一台简单的个人电脑可以被抽象为上面这种相似的模型,CPU、内存、I/O 设备都和总线串联起来并通过总线与其他设备进行通信。现代操作系统有着更为复杂的结构,会设计很多条总线,我们稍后会看到。暂时来讲,这个模型能够满足我们的讨论。
CPU
CPU 是计算机的大脑,它主要和内存进行交互,从内存中提取指令并执行它。一个 CPU 的执行周期是从内存中提取第一条指令、解码并决定它的类型和操作数,执行,然后再提取、解码执行后续的指令。重复该循环直到程序运行完毕。
每个 CPU 都有一组可以执行的特定指令集。因此,x86 的 CPU 不能执行 ARM 的程序并且 ARM 的 CPU 也不能执行 x86 的程序。由于访问内存获取执行或数据要比执行指令花费的时间长,因此所有的 CPU 内部都会包含一些寄存器来保存关键变量和临时结果。因此,在指令集中通常会有一些指令用于把关键字从内存中加载到寄存器中,以及把关键字从寄存器存入到内存中。还有一些其他的指令会把来自寄存器和内存的操作数进行组合,例如 add 操作就会把两个操作数相加并把结果保存到内存中。
除了用于保存变量和临时结果的通用寄存器外,大多数计算机还具有几个特殊的寄存器,这些寄存器对于程序员是可见的。其中之一就是 程序计数器(program Counter),程序计数器会指示下一条需要从内存提取指令的地址。提取指令后,程序计数器将更新为下一条需要提取的地址。
另一个寄存器是 堆栈指针(stack pointer),它指向内存中当前栈的顶端。堆栈指针会包含输入过程中的有关参数、局部变量以及没有保存在寄存器中的临时变量。
还有一个寄存器是 PSW(Program Status Word) 程序状态字寄存器,这个寄存器是由操作系统维护的8个字节(64位) long 类型的数据集合。它会跟踪当前系统的状态。除非发生系统结束,否则我们可以忽略 PSW 。用户程序通常可以读取整个PSW,但通常只能写入其某些字段。PSW 在系统调用和 I / O 中起着重要作用。
操作系统必须了解所有的寄存器。在时间多路复用(time multiplexing) 的 CPU 中,操作系统往往停止运行一个程序转而运行另外一个。每次当操作系统停止运行一个程序时,操作系统会保存所有寄存器的值,以便于后续重新运行该程序。
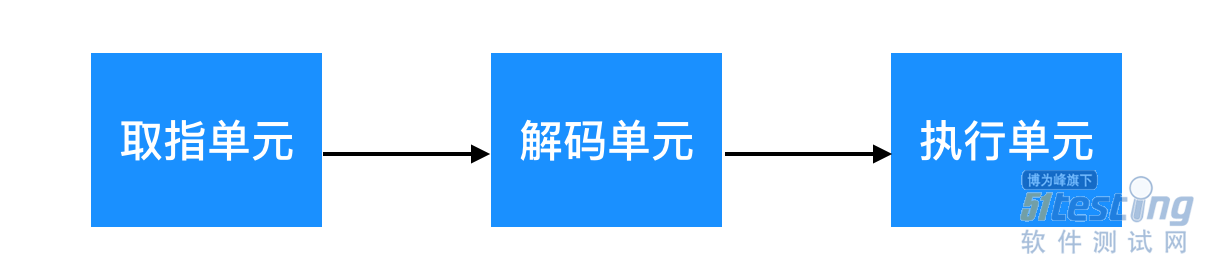
为了提升性能, CPU 设计人员早就放弃了同时去读取、解码和执行一条简单的指令。许多现代的 CPU 都具有同时读取多条指令的机制。例如,一个 CPU 可能会有单独访问、解码和执行单元,所以,当 CPU 执行第 N 条指令时,还可以对 N + 1 条指令解码,还可以读取 N + 2 条指令。像这样的组织形式被称为 流水线(pipeline)。
比流水线更先进的设计是 超标量(superscalar)CPU,下面是超标量 CPU 的设计。
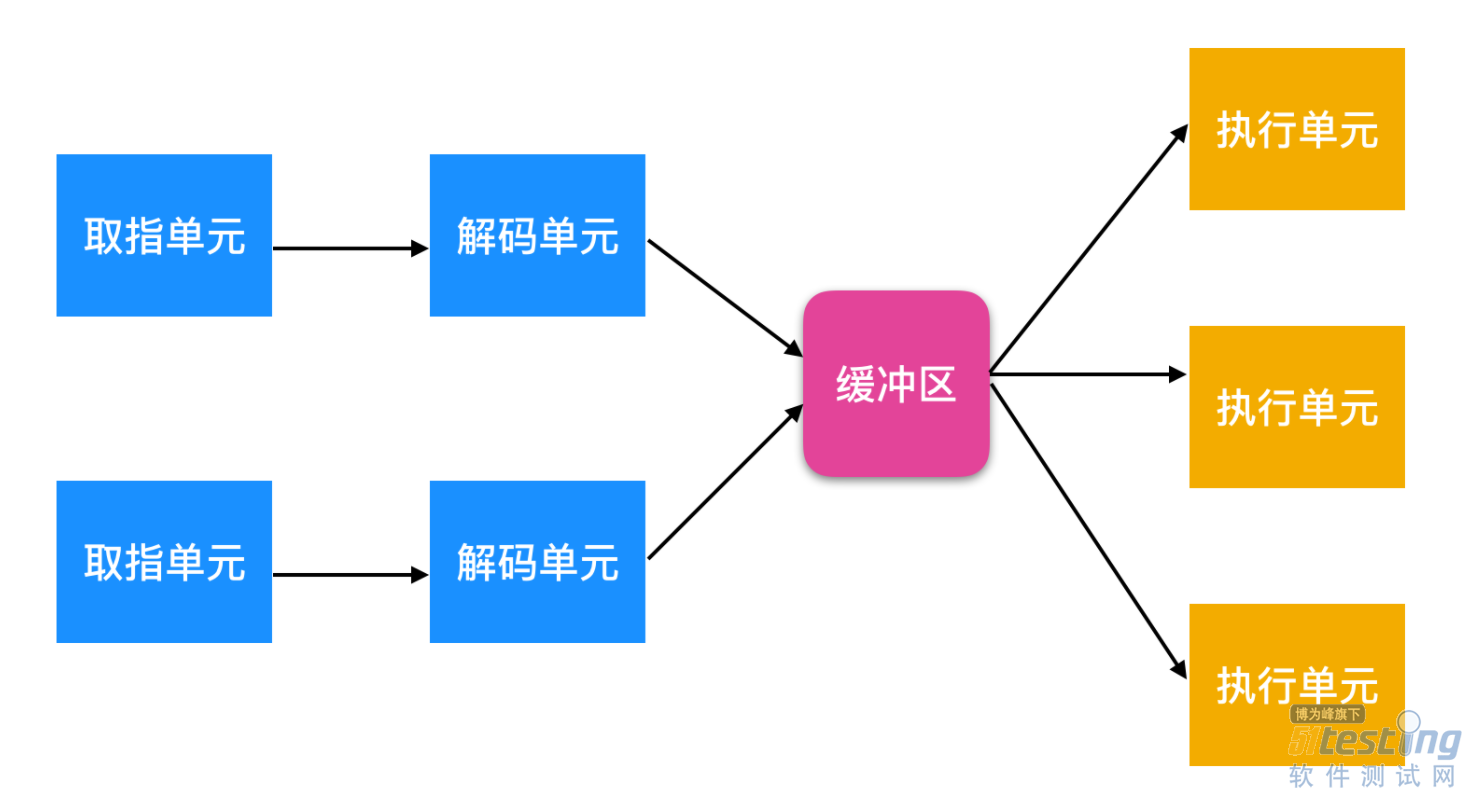
在上面这个设计中,存在多个执行单元,例如,一个用来进行整数运算、一个用来浮点数运算、一个用来布尔运算。两个或者更多的指令被一次性取出、解码并放入缓冲区中,直至它们执行完毕。只要一个执行单元空闲,就会去检查缓冲区是否有可以执行的指令。如果有,就把指令从缓冲区中取出并执行。这种设计的含义是应用程序通常是无序执行的。在大多数情况下,硬件负责保证这种运算的结果与顺序执行指令时的结果相同。
除了用在嵌入式系统中非常简单的 CPU 之外,多数 CPU 都有两种模式,即前面已经提到的内核态和用户态。通常情况下,PSW 寄存器中的一个二进制位会控制当前状态是内核态还是用户态。当运行在内核态时,CPU 能够执行任何指令集中的指令并且能够使用硬件的功能。在台式机和服务器上,操作系统通常以内核模式运行,从而可以访问完整的硬件。在大多数嵌入式系统中,一部分运行在内核态下,剩下的一部分运行在用户态下。
用户应用程序通常运行在用户态下,在用户态下,CPU 只能执行指令集中的一部分并且只能访问硬件的一部分功能。一般情况下,在用户态下,有关 I/O 和内存保护的所有指令是禁止执行的。当然,设置 PSW 模式的二进制位为内核态也是禁止的。
为了获取操作系统的服务,用户程序必须使用 系统调用(system call),系统调用会转换为内核态并且调用操作系统。TRAP 指令用于把用户态切换为内核态并启用操作系统。当有关工作完成之后,在系统调用后面的指令会把控制权交给用户程序。我们会在后面探讨操作系统的调用细节。
需要注意的是操作系统在进行系统调用时会存在陷阱。大部分的陷阱会导致硬件发出警告,比如说试图被零除或浮点下溢等你。在所有的情况下,操作系统都能得到控制权并决定如何处理异常情况。有时,由于出错的原因,程序不得不停止。
多线程和多核芯片
Intel Pentinum 4也就是奔腾处理器引入了被称为多线程(multithreading) 或 超线程(hyperthreading, Intel 公司的命名) 的特性,x86 处理器和其他一些 CPU 芯片就是这样做的。包括 SSPARC、Power5、Intel Xeon 和 Intel Core 系列 。近似地说,多线程允许 CPU 保持两个不同的线程状态并且在纳秒级(nanosecond) 的时间完成切换。线程是一种轻量级的进程,我们会在后面说到。例如,如果一个进程想要从内存中读取指令(这通常会经历几个时钟周期),多线程 CPU 则可以切换至另一个线程。多线程不会提供真正的并行处理。在一个时刻只有一个进程在运行。
对于操作系统来讲,多线程是有意义的,因为每个线程对操作系统来说都像是一个单个的 CPU。比如一个有两个 CPU 的操作系统,并且每个 CPU 运行两个线程,那么这对于操作系统来说就可能是 4 个 CPU。
除了多线程之外,现在许多 CPU 芯片上都具有四个、八个或更多完整的处理器或内核。多核芯片在其上有效地承载了四个微型芯片,每个微型芯片都有自己的独立CPU。

如果要说在绝对核心数量方面,没有什么能赢过现代 GPU(Graphics Processing Unit),GPU 是指由成千上万个微核组成的处理器。它们擅长处理大量并行的简单计算。
内存
计算机中第二个主要的组件就是内存。理想情况下,内存应该非常快速(比执行一条指令要快,从而不会拖慢 CPU 执行效率),而且足够大且便宜,但是目前的技术手段无法满足三者的需求。于是采用了不同的处理方式,存储器系统采用一种分层次的结构。

顶层的存储器速度最高,但是容量最小,成本非常高,层级结构越向下,其访问效率越慢,容量越大,但是造价也就越便宜。
寄存器
存储器的顶层是 CPU 中的寄存器,它们用和 CPU 一样的材料制成,所以和 CPU 一样快。程序必须在软件中自行管理这些寄存器(即决定如何使用它们)。
高速缓存
位于寄存器下面的是高速缓存,它多数由硬件控制。主存被分割成高速缓存行(cache lines) 为 64 字节,内存地址的 0 - 63 对应高速缓存行 0 ,地址 64 - 127 对应高速缓存行的 1,等等。使用最频繁的高速缓存行保存在位于 CPU 内部或非常靠近 CPU 的高速缓存中。当应用程序需要从内存中读取关键词的时候,高速缓存的硬件会检查所需要的高速缓存行是否在高速缓存中。如果在的话,那么这就是高速缓存命中(cache hit)。高速缓存满足了该请求,并且没有通过总线将内存请求发送到主内存。高速缓存命中通常需要花费两个时钟周期。缓存未命中需要从内存中提取,这会消耗大量的时间。高速缓存行会限制容量的大小因为它的造价非常昂贵。有一些机器会有两个或者三个高速缓存级别,每一级高速缓存比前一级慢且容量更大。
缓存在计算机很多领域都扮演了非常重要的角色,不仅仅是 RAM 缓存行。
随机存储器(RAM): 内存中最重要的一种,表示既可以从中读取数据,也可以写入数据。当机器关闭时,内存中的信息会丢失。
大量的可用资源被划分为小的部分,这些可用资源的一部分会获得比其他资源更频繁的使用权,缓存经常用来提升性能。操作系统无时无刻的不在使用缓存。例如,大多数操作系统在主机内存中保留(部分)频繁使用的文件,以避免重复从磁盘重复获取。举个例子,类似于 /home/ast/projects/minix3/src/kernel/clock.c 这样的场路径名转换成的文件所在磁盘地址的结果也可以保存缓存中,以避免重复寻址。另外,当一个 Web 页面(URL) 的地址转换为网络地址(IP地址)后,这个转换结果也可以缓存起来供将来使用。
在任何缓存系统中,都会有下面这几个噬需解决的问题:
・何时把新的内容放进缓存
・把新的内容应该放在缓存的哪一行
・在需要空闲空间时,应该把哪块内容从缓存中移除
・应该把移除的内容放在某个较大存储器的何处
并不是每个问题都与每种缓存情况有关。对于 CPU 缓存中的主存缓存行,当有缓存未命中时,就会调入新的内容。通常通过所引用内存地址的高位计算应该使用的缓存行。
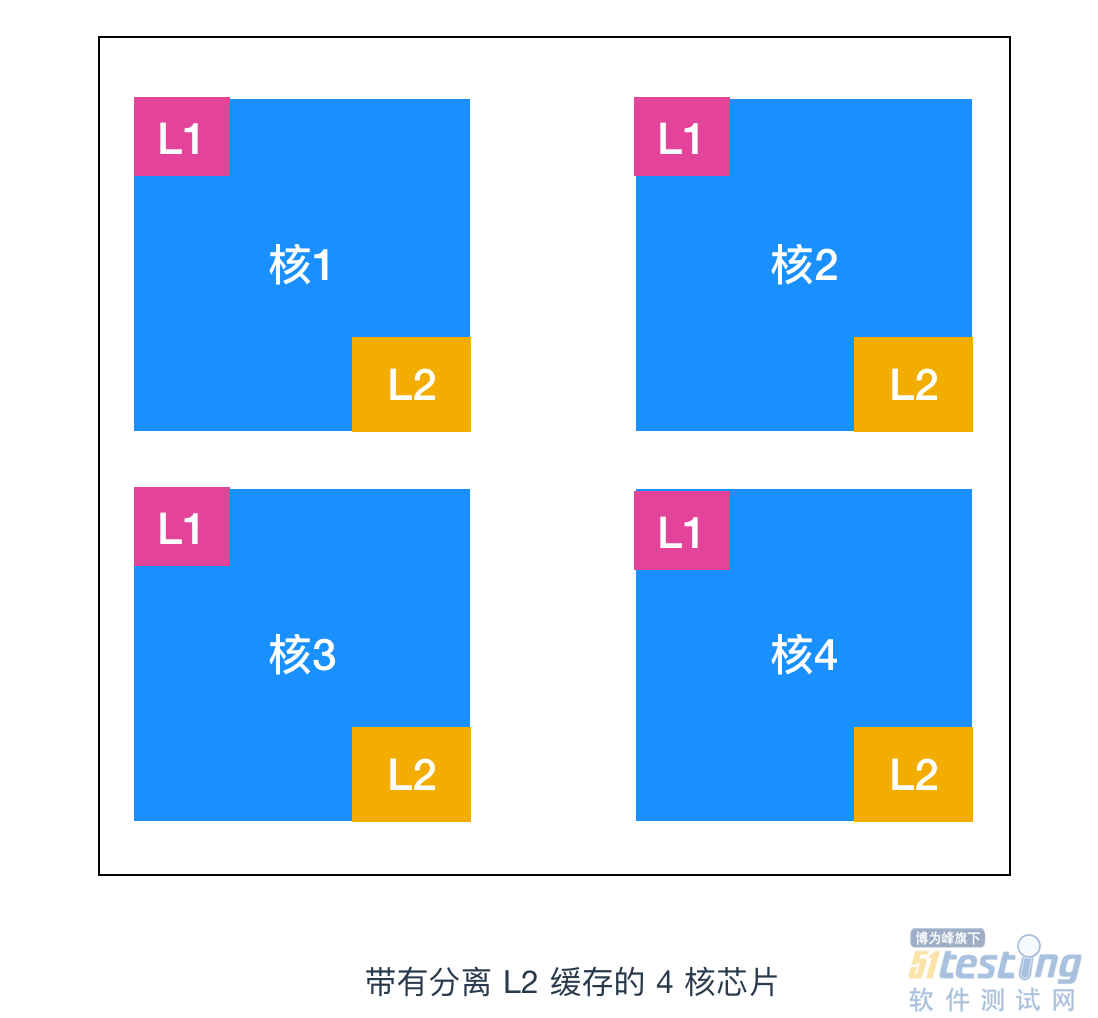
缓存是解决问题的一种好的方式,所以现代 CPU 设计了两种缓存。第一级缓存或者说是 L1 cache 总是位于 CPU 内部,用来将已解码的指令调入 CPU 的执行引擎。对于那些频繁使用的关键字,多数芯片有第二个 L1 cache 。典型的 L1 cache 的大小为 16 KB。另外,往往还设有二级缓存,也就是 L2 cache,用来存放最近使用过的关键字,一般是兆字节为单位。L1 cache 和 L2 cache 最大的不同在于是否存在延迟。访问 L1 cache 没有任何的延迟,然而访问 L2 cache 会有 1 - 2 个时钟周期的延后。
什么是时钟周期?计算机处理器或 CPU 的速度由时钟周期来确定,该时钟周期是振荡器两个脉冲之间的时间量。一般而言,每秒脉冲数越高,计算机处理器处理信息的速度就越快。 时钟速度以 Hz 为单位测量,通常为兆赫(MHz)或千兆赫(GHz)。 例如,一个4 GHz处理器每秒执行4,000,000,000个时钟周期。
计算机处理器可以在每个时钟周期执行一条或多条指令,这具体取决于处理器的类型。 早期的计算机处理器和较慢的 CPU 在每个时钟周期只能执行一条指令,而现代处理器在每个时钟周期可以执行多条指令。
主存
在上面的层次结构中再下一层是主存,这是内存系统的主力军,主存通常叫做 RAM(Ran dom Access Memory),由于 1950 年代和 1960 年代的计算机使用微小的可磁化铁氧体磁芯作为主存储器,因此旧时有时将其称为核心存储器。所有不能再高速缓存中得到满足的内存访问请求都会转往主存中。
除了主存之外,许多计算机还具有少量的非易失性随机存取存储器。它们与 RAM 不同,在电源断电后,非易失性随机访问存储器并不会丢失内容。ROM(Read Only Memory) 中的内容一旦存储后就不会再被修改。它非常快而且便宜。(如果有人问你,有没有什么又快又便宜的内存设备,那就是 ROM 了)在计算机中,用于启动计算机的引导加载模块(也就是 bootstrap )就存放在 ROM 中。另外,一些 I/O 卡也采用 ROM 处理底层设备控制。
EEPROM(Electrically Erasable PROM,) 和 闪存(flash memory) 也是非易失性的,但是与 ROM 相反,它们可以擦除和重写。不过重写它们需要比写入 RAM 更多的时间,所以它们的使用方式与 ROM 相同,但是与 ROM 不同的是他们可以通过重写字段来纠正程序中出现的错误。
闪存也通常用来作为便携性的存储媒介。闪存是数码相机中的胶卷,是便携式音乐播放器的磁盘。闪存的速度介于 RAM 和磁盘之间。另外,与磁盘存储器不同的是,如果闪存擦除的次数太多,会出现磨损。
还有一类是 CMOS,它是易失性的。许多计算机都会使用 CMOS 存储器保持当前时间和日期。
磁盘
下一个层次是磁盘(硬盘),磁盘同 RAM 相比,每个二进制位的成本低了两个数量级,而且经常也有两个数量级大的容量。磁盘唯一的问题是随机访问数据时间大约慢了三个数量级。磁盘访问慢的原因是因为磁盘的构造不同。

磁盘是一种机械装置,在一个磁盘中有一个或多个金属盘片,它们以 5400rpm、7200rpm、10800rpm 或更高的速度旋转。从边缘开始有一个机械臂悬横在盘面上,这类似于老式播放塑料唱片 33 转唱机上的拾音臂。信息会写在磁盘一系列的同心圆上。在任意一个给定臂的位置,每个磁头可以读取一段环形区域,称为磁道(track)。把一个给定臂的位置上的所有磁道合并起来,组成了一个柱面(cylinder)。
每个磁道划分若干扇区,扇区的值是 512 字节。在现代磁盘中,较外部的柱面比较内部的柱面有更多的扇区。机械臂从一个柱面移动到相邻的柱面大约需要 1ms。而随机移到一个柱面的典型时间为 5ms 至 10ms,具体情况以驱动器为准。一旦磁臂到达正确的磁道上,驱动器必须等待所需的扇区旋转到磁头之下,就开始读写,低端硬盘的速率是50MB/s,而高速磁盘的速率是 160MB/s。
需要注意,固态硬盘(Solid State Disk, SSD)不是磁盘,固态硬盘并没有可以移动的部分,外形也不像唱片,并且数据是存储在存储器(闪存)中,与磁盘唯一的相似之处就是它也存储了大量即使在电源关闭也不会丢失的数据。
许多计算机支持一种著名的虚拟内存机制,这种机制使得期望运行的存储空间大于实际的物理存储空间。其方法是将程序放在磁盘上,而将主存作为一部分缓存,用来保存最频繁使用的部分程序,这种机制需要快速映像内存地址,用来把程序生成的地址转换为有关字节在 RAM 中的物理地址。这种映像由 CPU 中的一个称为 存储器管理单元(Memory Management Unit, MMU) 的部件来完成。

缓存和 MMU 的出现是对
打印本页 | 加入收藏
上一篇:广州第十次软件测试交流会之职业发展探讨篇
文章检索
热门关键词: 登录